Zadanie
Dvojka si z fyzikálneho obchodu doniesol nehmotnú tyč dĺžky \(L\), nekonečne dlhú vodorovnú koľajnicu a raketku s hmotnosťou \(m\). Jeden koniec tyče zavesil voľne na koľajnicu – tu majú trecí koeficient \(f\) – a na druhý koniec kolmo pripevnil raketku tak, aby vektor jej ťahovej sily \(F\) vždy ležal vo zvislej rovine prechádzajúcej koľajnicou.
Raketka sa rozbehla a natočenie tyče voči smeru gravitácie sa pritom ustálilo na uhle \(\alpha\). Dvojka potom do raketky trochu drgol tak, aby sa tento uhol trošičku zvýšil, a tyč s raketkou začala okolo tohto uhla kmitať. Aká je uhlová frekvencia malých kmitov?
Poznámka: raketka je smutná a jej ťah je rádovo menší než jej tiaž.
To prvé, čo ako šikovní fyzici musíme urobiť, je nakresliť si všetky sily, čo v našom systéme pôsobia. Očividne tu bude ťah raketky \(F\), ako aj gravitačná sila \(F_g\) na ňu pôsobiaca, na jednej strane tyče. Na druhej strane tyče potom bude sila normálová \(F_n\), ktorá zabezpečuje, že tyč sa z koľaje neutrhne, a sila trecia \(F_t\). Spolu to vyzerá takto:
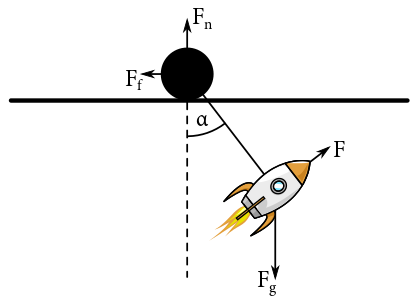
Najprv sa pozrieme na veľkosti týchto síl. Očividne \(F_g = mg\) a \(F\) je zadané. \(F\) vieme rozdeliť na dve zložky: vertikálnu, ktorá raketku odľahčuje, a horizontálnu, ktorá ju urýchľuje pozdĺž koľajnice. \(F_n\) potom bude rovná rozdielu \(F_g\) a vertikálnej zložky \(F\), teda \(F_n = mg - F\sin{\varphi}\), kde \(\varphi\) je odklon tyče od smeru tiažového zrýchlenia. A napokon, trecia sila je očividne \(F_t = fF_n\).
Teraz sa môžeme spýtať, ktoré z týchto síl ovplyvňujú uhlové vychýlenie tyče. Tu môžeme urobiť arbitrárne rozhodnutie, kam umiestnime os otáčania a potom sa jednoducho pozrieme na zodpovedajúce momenty síl. Môže sa zdať rozumné umiestniť os otáčania do miesta dotyku tyče a koľaje, no v skutočnosti bude celý systém omnoho krajší, keď os otáčania umiestnime do ťažiska systému tyč-raketka – čo je, keďže tyč je nehmotná, priamo v raketke. Potom vidíme, že jediné sily, ktoré na systém tyč-raketka pôsobia nenulovým momentom sily sú \(F_n\) a \(F_t\) (tu by sme ešte po správnosti mali zarátať fiktívnu silu, ktorá je výsledkom toho, že naša zvolená os otáčania je neinerciálna a zrýchľuje zrýchlením \(a\), ale keďže tento koniec tyče má nulovú hmotnosť, aj táto fiktívna sila má nulovú magnitúdu - o tom viac v poznámkach na konci). Spomenieme si na vzorec pre veľkosť momentu sily \[ \left|\vec{M}\right| = \left|\vec{F}\right|\left|\vec{r}\right|\sin{\alpha_{F - r}}. \]
Z nákresu ľahko nahliadneme, že celkový moment sily pôsobiaci na raketku je \[ M = F_nL\left(f\cos{\varphi} - \sin{\varphi}\right). \]
Prv, než sa pustíme do skúmania kmitavého pohybu raketky, nájdeme uhol \(\alpha\), na ktorom sa systém ustáli pred tým, ako doňho drgneme. V ustálenom stave je uhlové zrýchlenie nulové, a teda pre uhol \(\alpha\) platí rovnica \[ f\cos{\alpha}-\sin{\alpha} = 0, \] čo upravíme na \[ \alpha = \arctan{f}. \]
Na to, aby sme našli pohyb systému, musíme teraz zmeniť bod otáčania na taký, v ktorom máme nenulový moment zotrvačnosti. Až teraz ho teda umiestnime do bodu dotyku tyče a koľajnice. Nesmieme zabudnúť, že tento bod zrýchľuje zrýchlením \(\frac{1}{m}\left(F\cos{\varphi}-fF_n\right)\). Keď teda prejdeme do neinerciálnej vzťažnej sústavy vzťahujúcej sa na tento bod, na raketku bude pôsobiť d’Alembertova sila veľkosti \(F\cos{\varphi}-fF_n\) opačným smerom ako je smer pohybu, ktorej moment je teda \(M_A=-L\left(F(\cos^2{\varphi}+f\sin{\varphi}\cos{\varphi})-fmg\cos{\alpha}\right)\). Okrem nej pre túto os otáčania na raketku pôsobia ešte momenty gravitačnej a ťahovej sily: \(M_g=-Lmg\sin{\varphi},M_F=LF\). Ostatné momenty síl (normálovej a trecej) majú nulové rameno sily.
Vzhľadom na to, že systém tyč-raketka je v podstate len hmotný bod, ktorý je od našej zvolenej osi otáčania vzdialený \(L\), jeho moment zotrvačnosti je triviálne \(I = mL^2\). Napíšeme si moment sily ako súčin momentu zotrvačnosti a uhlového zrýchlenia, dosadíme naše tri nenulové momenty síl a získavame tak našu hlavnú pohybovú rovnicu \[ mL^2 \Derivative[2]{\varphi}{t} = L\left(mg - F\sin{\varphi}\right)\left(f\cos{\varphi} - \sin{\varphi}\right). \]
Toto sa môže na prvý pohľad zdať beznádejné, no ctený čitateľ nech nezúfa – veľa týchto vecí sa vieme zbaviť vďaka aproximáciám. V prvom rade skúsme trochu vyčistiť pravú stranu rovnice: \[ \frac{m}{mg - F\sin{\varphi}}L \Derivative[2]{\varphi}{t} = f\cos{\varphi} - \sin{\varphi} \]
Keďže sa budeme pýtať na malé kmity okolo tohto uhla, bolo by fajn spraviť si novú premennú \(\beta\), ktorá popisuje uhlovú výchylku tyče od tohto rovnovážneho stavu. Inými slovami \[ \beta = \varphi - \arctan{f} \qquad\Rightarrow\qquad \varphi = \beta + \arctan{f} \qquad\Rightarrow\qquad \Derivative[2]{\varphi}{t} = \Derivative[2]{\beta}{t}, \] kde \(\beta \ll 1\).
Teraz zoberieme túto substitúciu a postupne ju vrazíme do našej pohybovej rovnice. Začneme zlomkom na ľavej strane: \[ \begin{aligned} \frac{m}{mg - F\sin{\varphi}} &= \frac{m}{mg - F\sin{\left(\beta + \arctan{f}\right)}} \\ &= \frac{m}{mg - F\left(\sin{\beta}\cos{\arctan{f}} + \cos{\beta}\sin{\arctan{f}}\right)} \\ &= \frac{1}{g}\frac{1}{1 - \frac{F}{mg}\frac{1}{\sqrt{1 + f^2}}\left(\sin{\beta} + f\cos{\beta}\right)} \end{aligned} \]
Zo zadania vieme, že \(F\ll mg\), teda \(\frac{F}{mg}\ll 1\). Pravú stranu teda vieme aproximovať ako \(\frac{1}{g}\), pokiaľ ukážeme, že \(\frac{1}{\sqrt{1 + f^2}}\left(\sin{\beta} + f\cos{\beta}\right)\leq 1\). Inými slovami, chceme ukázať, že \[ \sin{\beta} + f\cos{\beta}\leq \sqrt{1 + f^2}. \]
Keďže obe strany rovnice sú kladné (je bezpečné predpokladať, že \(\beta\ll f\)), táto nerovnica bude platiť, keď bude platiť jej štvorec: \[ \begin{aligned} \left(\sin{\beta} + f\cos{\beta}\right)^2 &\leq 1 + f^2, \\ \sin^2{\beta} + f^2\cos^2{\beta} + 2f\sin{\beta}\cos{\beta} &\leq 1 + f^2, \\ \beta &\leq \frac{1}{2f}, \end{aligned} \] čo platí, keďže očakávame, že \(f\) nebude rádovo viac ako \(1\), pričom v poslednej úprave sme využili, že pre malé \(\beta\) platí \(\sin \beta \approx \beta\) a \(\cos \beta \approx 1\). Našu pohybovú rovnicu teda vieme zapísať ako \[ \frac{L}{g} \Derivative[2]{\varphi}{t} = f\cos{\varphi} - \sin{\varphi}. \]
Teraz dosadíme našu substitúciu aj do zvyšku rovnice a po troche upravovania opäť použijeme aproximácie pre malé uhly: \[ \begin{aligned} \frac{L}{g}\Derivative[2]{\beta}{t} &= f\cos{\left(\beta + \arctan{f}\right)} - \sin{\left(\beta + \arctan{f}\right)} \\ &= f\left(\cos{\beta}\cos{\arctan{f}} - \sin{\beta}\sin{\arctan{f}}\right) - \sin{\beta}\cos{\arctan{f}} - \cos{\beta}\sin{\arctan{f}} \\ &= f\cos{\beta}\frac{1}{\sqrt{1 + f^2}} - f\sin{\beta}\frac{f}{\sqrt{1 + f^2}} - \sin{\beta}\frac{1}{\sqrt{1 + f^2}} - \cos{\beta}\frac{f}{\sqrt{1 + f^2}} \\ &= -\sin{\beta}\frac{1 + f^2}{\sqrt{1 + f^2}} \\ \frac{L}{g}\Derivative[2]{\beta}{t} &= -\sqrt{1 + f^2}\beta \end{aligned} \]
V tomto už spoznávame rovnicu harmonického oscilátora hmotnosti \(\frac{L}{g}\) a tuhosti \(\sqrt{1 + f^2}\). Uhlová rýchlosť je potom jednoducho \[ \omega = \sqrt{\frac{g\sqrt{1 + f^2}}{L}}. \]
Poznámka č. 1
V tejto úlohe sa veľmi silno používajú niektoré nie úplne známe trigonometrické identity, konkrétne \[ \sin{\arctan{x}} = \frac{x}{\sqrt{1 + x^2}} \QQText{a} \cos{\arctan{x}} = \frac{1}{\sqrt{1 + x^2}}. \]
Takéto veci si nikto nepamätá všetky a preto je fajn, že sa dajú nájsť na internete, napríklad na Wikipédii v článku https://en.wikipedia.org/wiki/List_of_trigonometric_identities.
Poznámka č. 2
Ak by sme os otáčania predsa len umiestnili do bodu dotyku tyče s koľajnicou, museli by sme spraviť ešte jeden krok – konkrétne zarátať fiktívnu silu (a teda aj fiktívny moment sily) pôsobiacu na raketku. Tá vznikla, keď sme prešli do neinerciálnej vzťažnej sústavy zrýchľujúcej spolu s raketkou so zrýchlením daným rozdielom horizontálnej zložky ťahu raketky a trecej sily pôsobiacej na systém tyč-raketka. To by vyprodukovalo niekoľko škaredých rovníc, ktorým sme sa tu úspešne vyhli – konečný výsledok by bol ale pochopiteľne rovnaký.
Pozorný čitateľ sa možno pozastavil nad tým, že tým, že sme umiestnili os otáčania do jediného hmotného bodu v našom systéme, sme eliminovali všetky fiktívne sily v rátaní stabilnej výchylky \(\alpha\). Hoci os otáčania je stále neinerciálna, fiktívna sila pôsobiaca na každý komponent vo vzťažnej sústave osi otáčania je úmerná hmotnosti tohoto komponentu, a všetky tieto komponenty (v našom prípade len ten koniec tyče, ktorý sa dotýka koľajnice) majú nulovú hmotnosť.
Toto ale vyúsťuje v to, že \(\alpha\) je funkciou jedine parametra \(f\) a nezávisí od hodnôt \(F\) a \(m\). Toto sa môže zdať ako chyba – napokon, ak by sme dali \(m\) veľmi veľké (a teda aj tiaž by bola veľká), ale \(F\) veľmi malé, raketka by sotva dosiahla uhol \(\arctan{f}\) pre arbitrárne \(f\)! Tu to ale vyjde tak, že kým raketka nedosiahne tento uhol, systém sa po koľaji nerozbehne, keďže horizontálna zložka ťahu nedosiahne hodnotu \(fF_n\) (a teda aj skutočná hodnota \(F_f\) bude menšia než \(fF_n\)). Inými slovami, do istej hodnoty \(F\) sa raketka len čoraz viac nakláňa, až kým \(F_f\) nedosiahne \(fF_n\), a vtedy sa celý systém rozbehne – a toto je vždy pri uhle naklonenia \(\arctan{f}\). No a keďže v zadáni je napísané, že raketka sa hýbe, môžeme predpokladať, že \(f\) je dostatočne malé na to, aby bol tento uhol dosiahnutý, aj keď \(F \ll mg\).
Diskusia
Tu môžte voľne diskutovať o riešení, deliť sa o svoje kusy kódu a podobne.
Pre pridávanie komentárov sa musíš prihlásiť.